- شماره تلفن دفتر دانشگاه : 37934124 - 031
- آموزشگاه مداد خلاق : 03132226600
- تلفن همراه : 09960798900
- fidar.teb.vira@gmail.com

معرفی انواع ربات های پوشیدنی
مارس 30, 2021
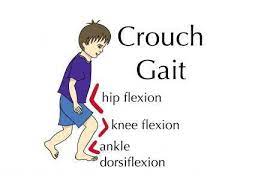
فلج مغزی و Crouch gait
می 10, 2021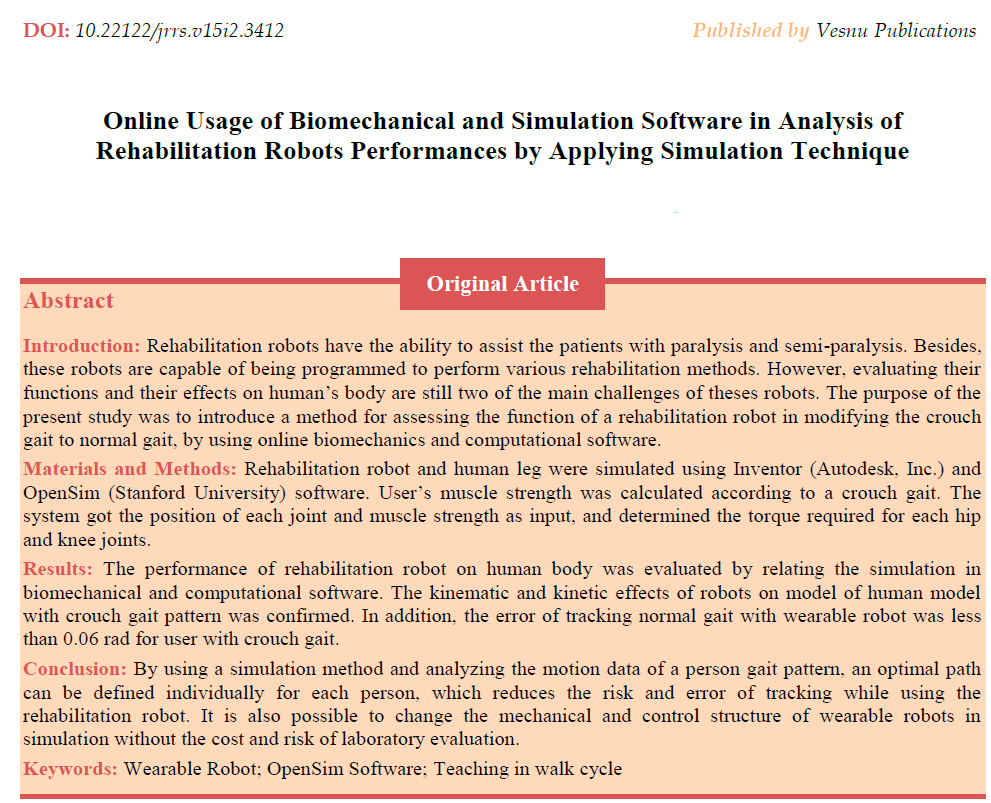
مقدمه
ربات های توان بخشی امکان حرکت اندام فلج و یا نیمه فلج را فراهم می کنند. این ربات ها قابلیت برنامه ریزی دارند و می توان روش های مختلف توان بخشی را با کمک آن ها تحقق بخشید. از جمله چالش های اصلی این وسایل، چگونگی ارزیابی عملکرد درست ربات ها و بررسی اثرات آن بر روی افراد است. هدف از انجام پژوهش حاضر، معرفی روش ارزیابی عملکرد یک ربات پوشیدنی، در اصلاح سیکل راه رفتن اندام تحتانی شخص مبتلا به اختلال حرکتی راه رفتن چمباتمه ای با استفاده برخط از نرم افزارهای بیومکانیکی و محاسباتی بود.
مواد و روش ها
مدل ربات پوشیدنی برای یک پا و مدل بدن انسان با استفاده از نرم افزار های Autodesk Inventor و OpenSim شبیه سازی شد. سپس نیروی عضلات با توجه به الگوی راه رفتن فرد دارای اختلال حرکتی چمباتمه ای محاسبه گردید. با اعمال نیرو و با استفاده از نرم افزار OpenSim، موقعیت، سرعت و شتاب مفاصل ران و زانو به صورت برخط به دست آمد و به عنوان ورودی به سیستم کنترل ربات ارسال شد.
یافته ها
با برقراری ارتباط بین نرم افزارهای شبیه سازی، بیومکانیکی و محاسباتی، تاثیر یک ربات پوشیدنی بر روی مدل انسان و همچنین، اثر آن بر روی عضلات حین راه رفتن بررسی و موثر بودن استفاده از این روش تایید گردید. یافته های حاصل از شبیه سازی نشان داد که ربات پوشیدنی برای کاربر دارای اختلال حرکتی چمباتمه ای، مسیر راه رفتن طبیعی را با خطای کمتر از ۰۶/۰ رادیان دنبال کرد.
نتیجه گیری
با استفاده از روش شبیه سازی و تحلیل داده های حرکتی فرد دارای اختلال، می توان مسیر بهینه مناسب با هر فرد را به صورت مجزا برای ربات توان بخشی تعریف کرد که سبب کاهش خطر استفاده ار ربات و خطای ردیابی حین استفاده از ربات توان بخشی می شود. همچنین، امکان تغییر ساختار مکانیکی و کنترلی ربات های پوشیدنی بدون صرف هزینه وجود دارد.
دانلود مقاله از طریق لینک https://www.magiran.com/paper/2103824
{kind=link}