- شماره تلفن دفتر دانشگاه : 37934124 - 031
- آموزشگاه مداد خلاق : 03132226600
- تلفن همراه : 09960798900
- fidar.teb.vira@gmail.com

فلج مغزی و Crouch gait
می 10, 2021
Designing a robust controller for a lower limb exoskeleton to treat an individual with crouch gait pattern in the presence of actuator saturation
آگوست 24, 2021
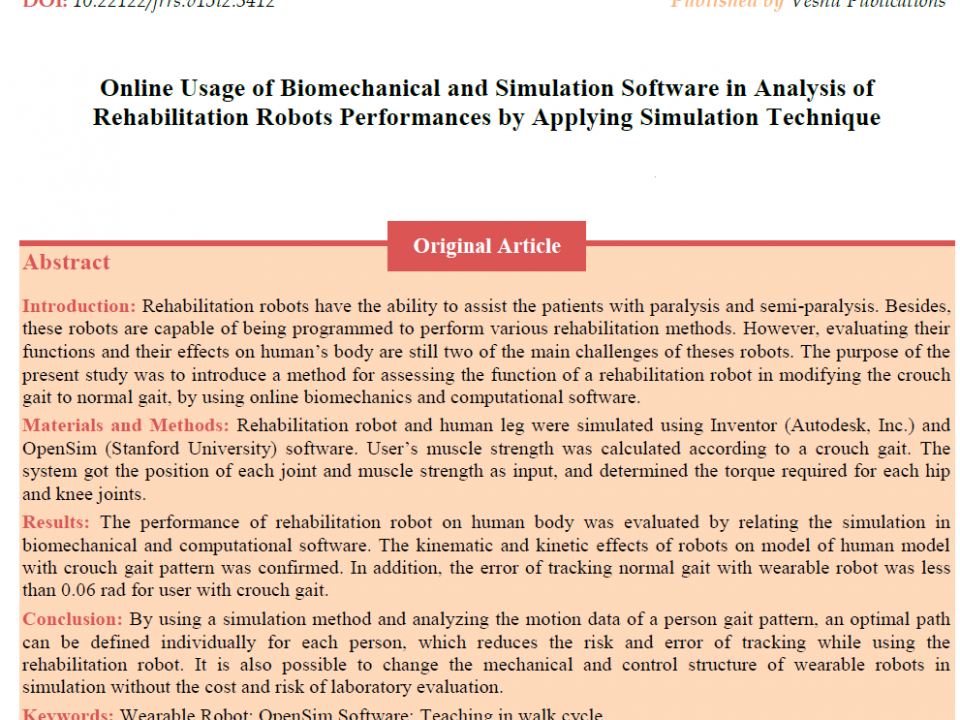
تاکنون نمونه های مختلفی از ربات های پوشیدنی با کاربرد بازتوانی طراحی و ساخته شده اند. یکی از چالش برانگیزترين بخش های طراحی ربات های اسکلت خارجی، طراحی سیستم کنترل حرکت آن است. در ربات های پوشیدنی به دلیل غیر خطی بودن مدل دینامیکی، عدم قطعیت پارامترها، ساختارهای مدل نشده یا ساده شده و اغتشاش خارجی (ناشی از نیروی اعمال شده توسط کاربر) استفاده از روش های کنترلی مقاوم ضروری است. بنابراین در این پژوهش جهت تخمین کلیه عوامل ناخواسته بصورت یک اغتشاش کلی از رویتگر غیر خطی اغتشاش استفاده شد و کنترل کننده مقاوم مورد استفاده LQR-FOBSC از ترکیب دو کنترل کننده LQR و پسگام مرتبه کسری طراحی شد. مزیت کنترل کننده LQR ، انتخاب ورودی کنترلی برای رسیدن سریع و بهینه به نقطه تعادل است و FOBSC مقاوم بودن کنترل کننده در برابر عدم قطعیت و اغتشاش و کاهش چترینگ را تضمین می کند. همچنین جهت انتخاب مناسب ضرایب تابع هدف کنترل کننده LQR از الگوریتم ازدحام ذرات استفاده شد. به منظور ارزیابی روش کنترلی ارایه شده، بین نرم افزارهای بیومکانیکی اپن سیم برای شبیه سازی بدن انسان و ربات و محاسباتی متلب به صورت بر خط ارتباط برقرار شد. با استفاده از متلب در هر لحظه ورودی کنترلی محاسبه و به ربات اعمال و اثر آن روی ماهیچه ها و استخوان ها ی بدن کاربر با استفاده از نرم افزار اپن سیم مشاهده و موقعیت مفصل زانو محاسبه گردید. روش حاضر با روش های پسگام مود لغزشی، مرتبه کسری و LQR مقایسه و برتری آن نشان داده شد.
دانلود مقاله از طریق لینک https://mme.modares.ac.ir/article-15-24226-fa.html
{kind=link}